News
Jag har dock haft en ide malande i huvudet under en längre tid och nu kändes det möjligt att försöka genomföra den. Fanns en tanke om att kanske kunna köra en runda med 240:n när jag fyllde 50 men det förstod jag ganska snart bara var önsketänkande. Detta projektet är nog bland de största jag har gjort på 240:n och det får ta sin tid för det är mycket pengar som går åt pipan om jag misslyckas.
Jag har ju inte haft någon startmotor på ett bra tag och det har ju sina nackdelar. Bl.a måste man vara ganska många bara för att åka iväg och köra och det är inte det lättaste nu när alla kompisar har familj och tiden är en stor bristvara för de flesta. En annan nackdel är att jag inte kan starta i garaget eller på pallbockar var jag än är. Jag är även mån om att hålla nere den roterande massan så gott jag kan på vevaxeln så att montera en startkrans tar emot.
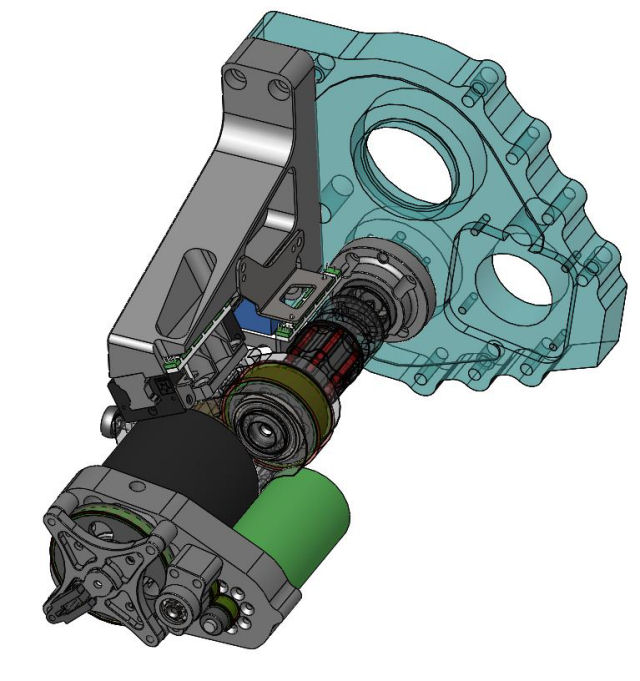
Lösningen jag klurat en längre tid på är att försöka driva bottenstocken med en liten RC-motor. Enheten måste kunna kopplas loss under drift då tanken inte är att bidra med effekt vid körning. En positiv bieffekt med denna lösning vore att jag skulle kunna köra runt i depån och kanske även lasta på släp etc med hjälp av denna framdrivning. Vid start är kopplingen uppe och vid förflyttning är den nertryckt.
MÅNGA timmars klurande i CAD:en så tycker jag att det finns en möjlighet att det skulle kunna gå att få ihopa. Finns väldigt många oklarheter som behöver verifieras innan jag ger mig på att modifiera lådan för då börjar slantarna snabbt rulla
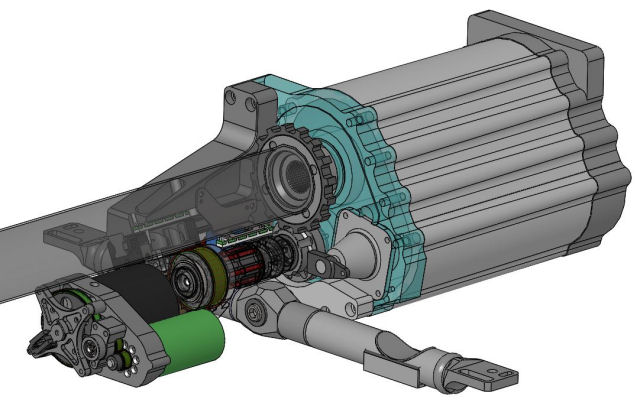
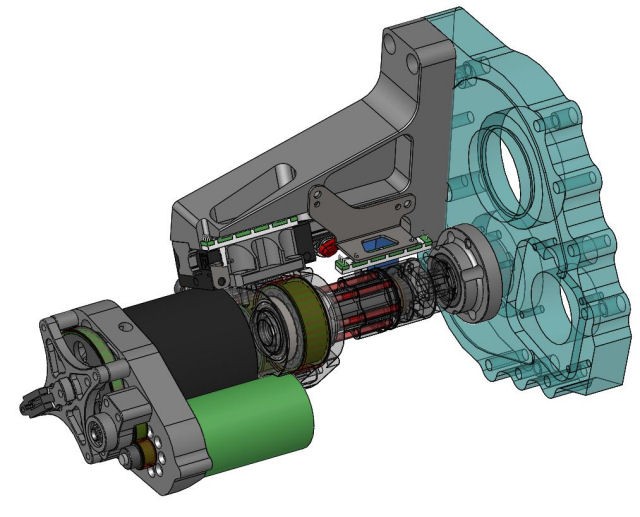
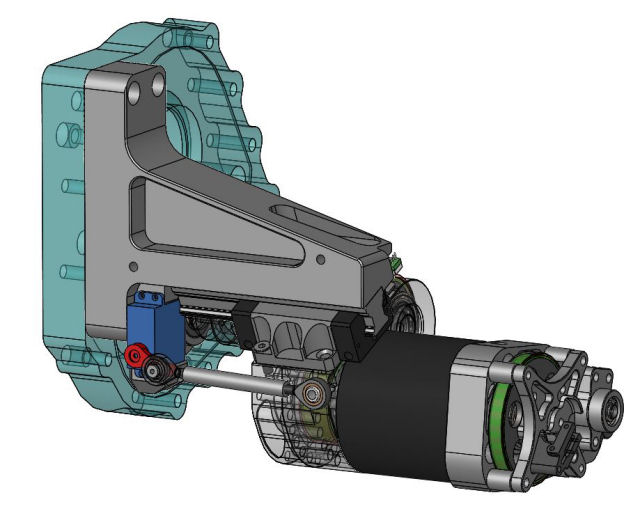
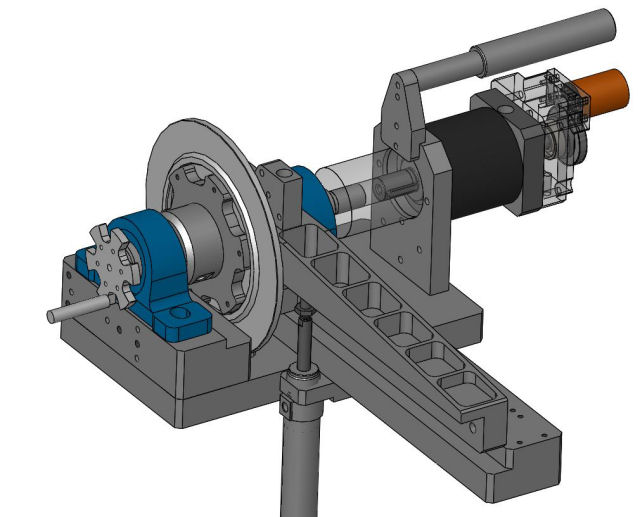
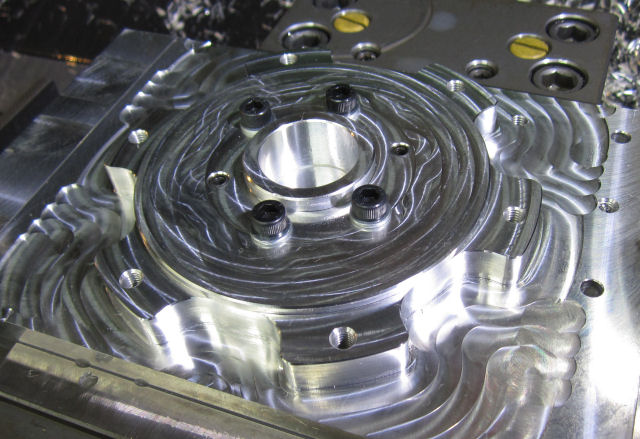
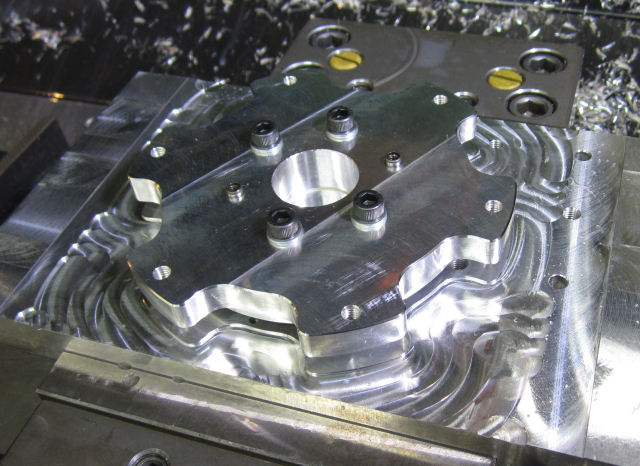
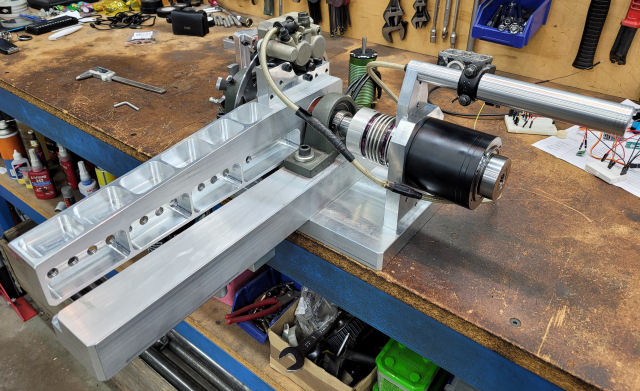
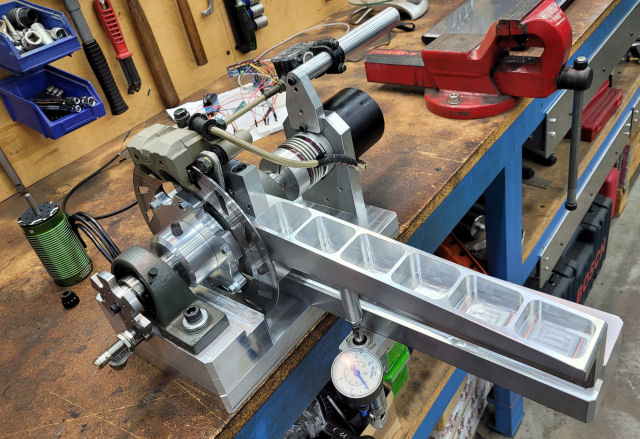
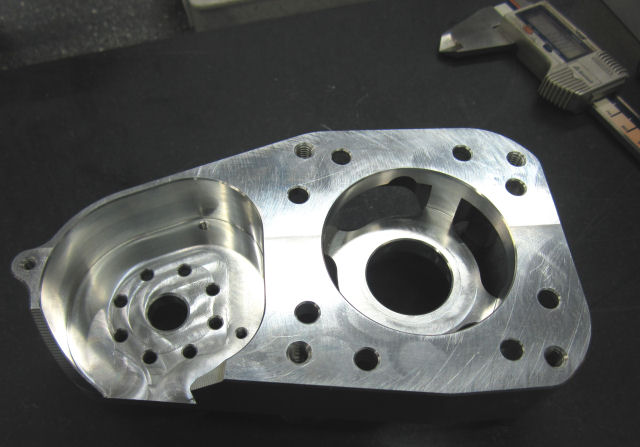
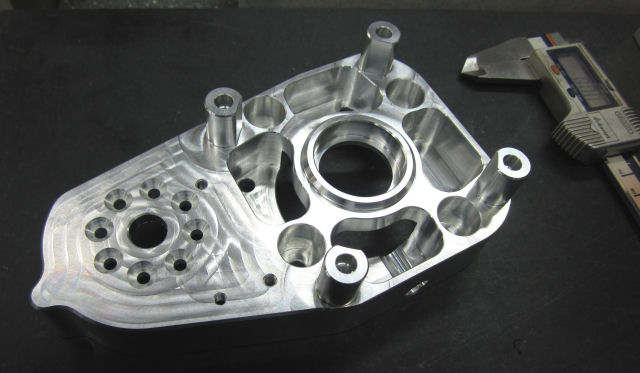
I grova drag bygger det på att en klokoppling sitter monterad på bottenstocken. Tanken är en lagrad tapp i bakgaveln på huset. Den skall ha någon form av interface till bottenstocken. Finns en hel del tankar kring detta men det blir en senare fråga. Hela drivpaketet sitter på en linjärskena som är fäst i lådhuset via en stabil vinkel. Drivpaketet rörs i längsled via en RC-servo. Positionen återkopplas via en linjärpotentiometer. Fram på drivpaketet sitten motsvarande klokoppling som på bottenstocken. Klokopplingen har vinklade flanker så den kan bara driva åt ena hållet och snäpper över när vinkelhastigheten är högre på bottenstocken än drivenheten. Klokopplingen på drivpaketet sitter på en splinesaxel och är fjäderbelastad så den kan fjädra bak för att snäppa över. Även positionen på drivpaketets klokoppling återkopplas via linjärpotentiometer. För att ytterligare komplicera det hela vill jag kunna använda backväxelns utväxling då den är mycket högre än 1:an när jag skall förflytta bilen i depån. För att detta skall vara möjligt kan man köra in drivenheten så längt att en tapp från drivenheten går i ett fyrkantigt hål i lådans klokoppling som då kan överföra moment i båda vridriktningarna (för att få bilen att röra sig framåt med backen i måste ju bottenstocken snurra baklänges).
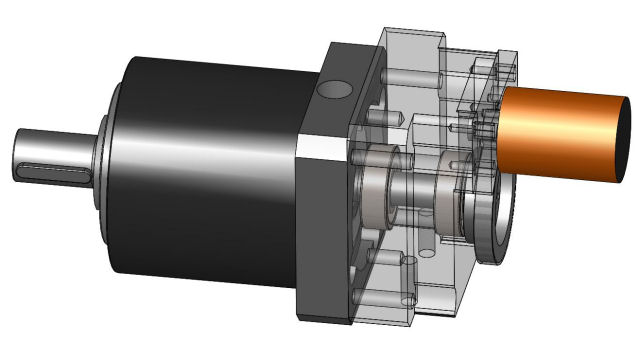
RC-motorer har en gemensam egenskap. De snurrar fort. Toppvarvtalen ligger mellan 25 000 - 50 000rpm. Det innebär att jag behöver mycket växel för att komma ner till 300 - 400rpm som motorn behöver för att starta. Hittade en gammal Rexroth / Wittenstein planetväxel i hyllorna som kanske kunde tänkas funka till ändamålet. Känner Johan Ralmark på Wittenstein efter många växeldiskussioner via jobbet och han har varit ett ovärderligt bollplank i om det över huvudtaget skulle vara lönt att prova med denna växel. Det är inte rätt på pappret om man säger så...
Jag har ett långt excelark för att bolla olika utväxlingsmöjligheter men det slutade med en utväxling på 4.5:1 innan planeten och 32:28 efter. Total utväxling lite över 51:1
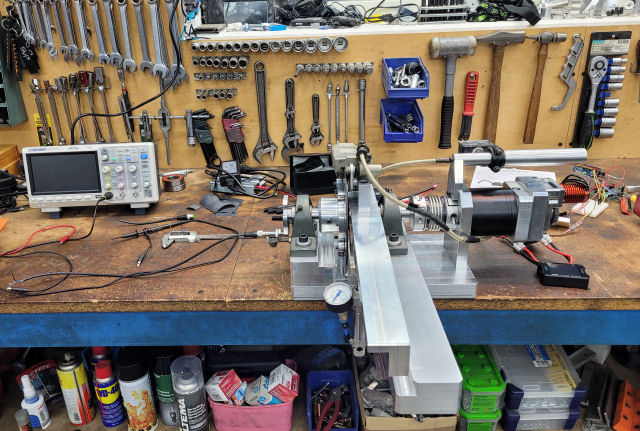
Nåja, hitentills har det varit mycket teori. Dax att göra lite mer praktiska övningar
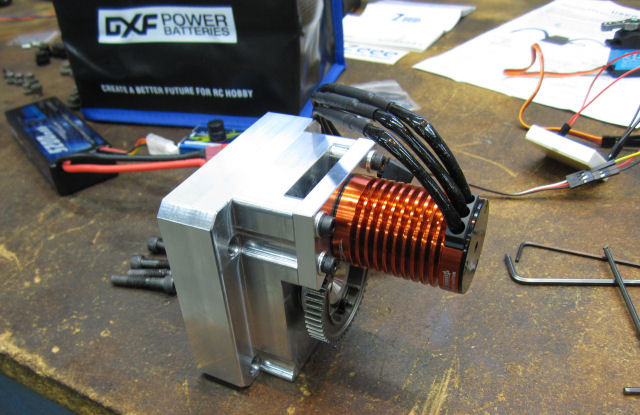
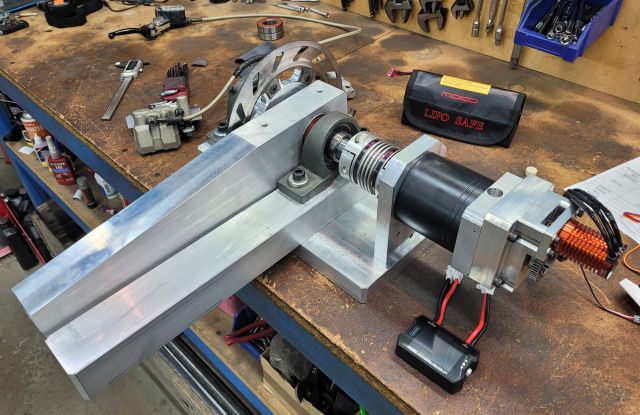
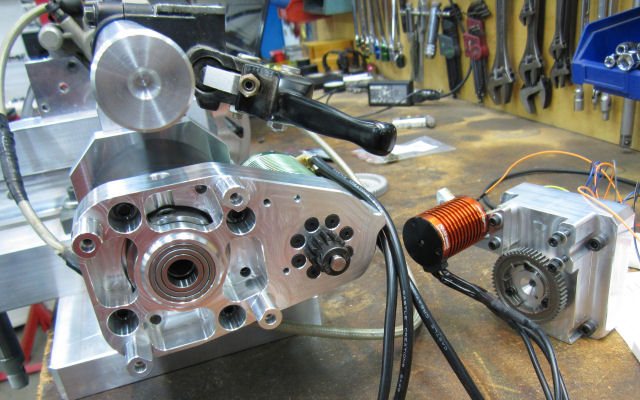
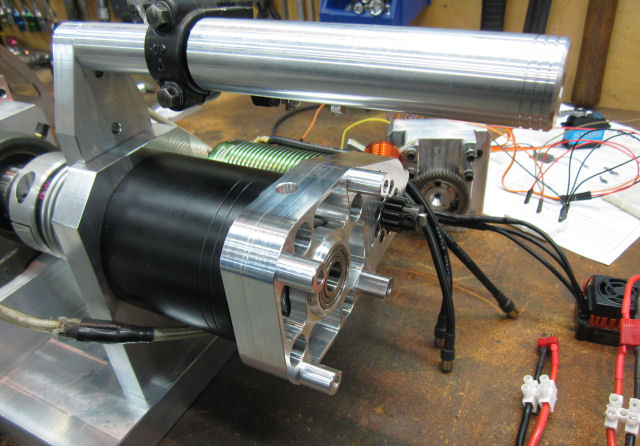
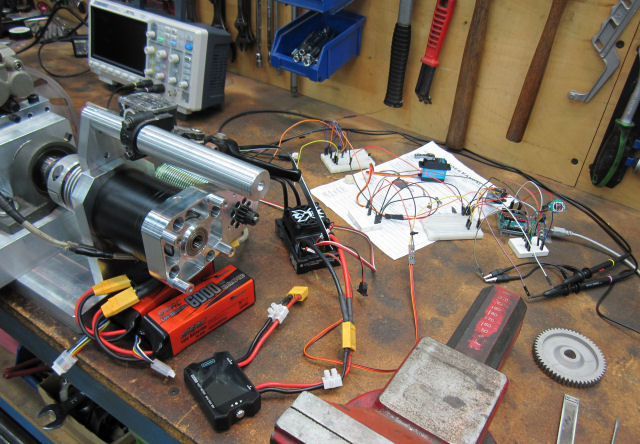
CAD:ade ihop en lösning för att känna lite på det hela i praktiken. Handlade även kugghjul med modul 1 i storlekar 12 och 54. Inte helt lätt att hitta med rätt axeldiameter till motorn och det stora hade ingen centrumstyrning alls. Nåja, det skall ju bara vara till tester så det fick duga.
Fick handla batteri och laddare också så det gick att få ihop ett helt kit att testa.
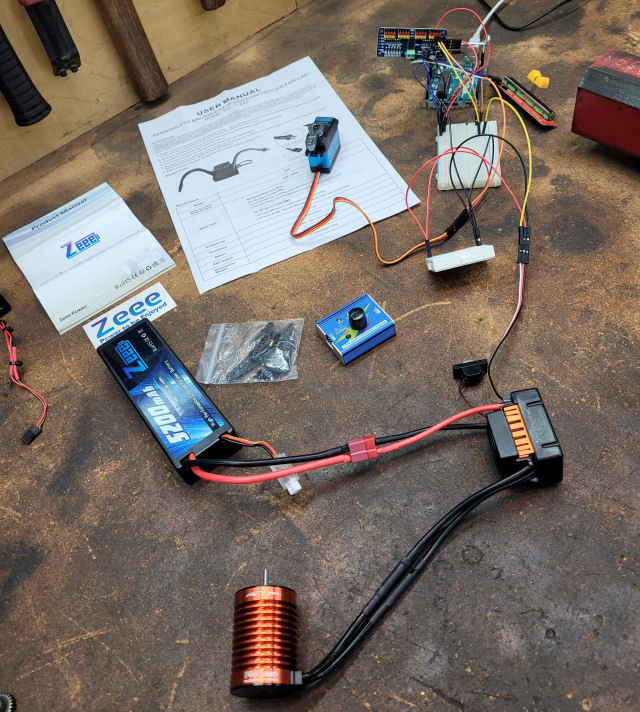
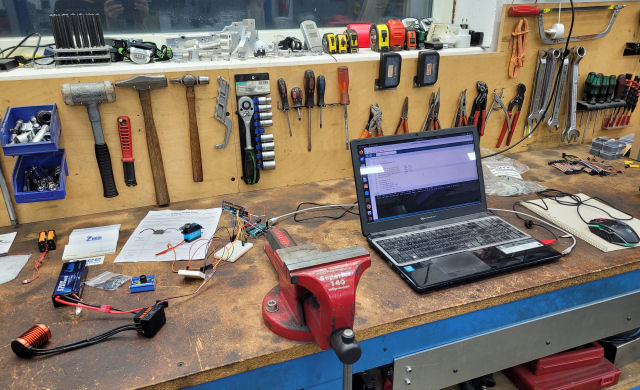
Det skall ju till någon form av firmware till Arduinon om det skall bli någon rörelse. Blev en hyggligt enkel mjukvara bara för att testa så allt fungerade.
Mittenläge på potentiometern motsvarade noll gaspådrag. Motorn står stilla och servot är i centrum. Potentiometer uppåt ger motorrotation bakåt samtidigt som servot indikerar utslag. Potentiometer ner ger motorrotation framåt och servot indikerat utslag åt andra hållet. Dessutom skickas lite värde seriellt till serialmonitor på datorn för enklare felsökning. Allt verkade funka efter lite justering av kod så det var bara att fortsätta mot fräsen

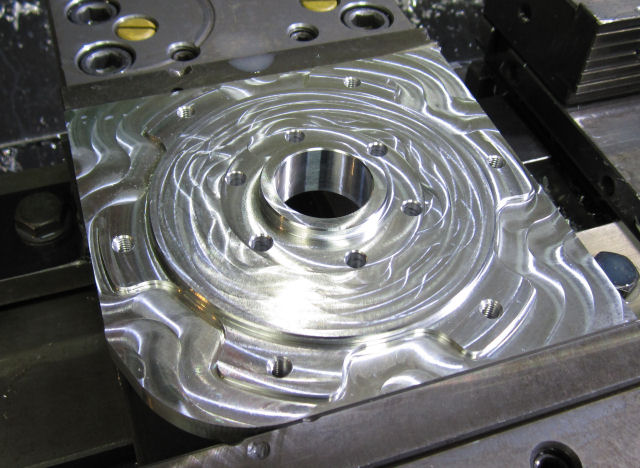
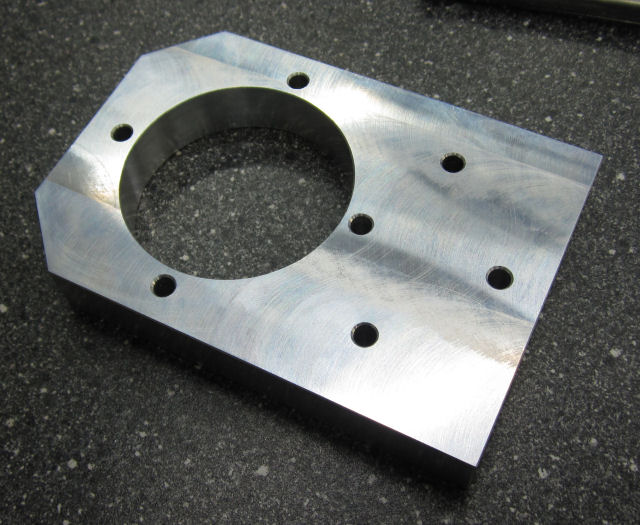
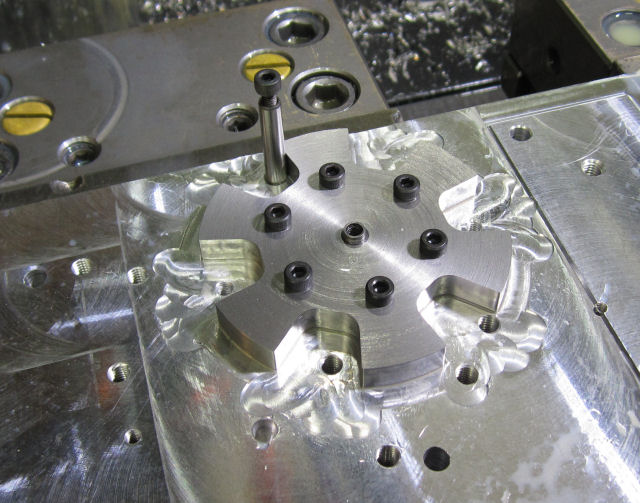
Svarvade även till axeln för det stora kugghjulet samt hade det uppe i fräsen för borrning och gängning av fästhål


Titta direkt på Tuben så blir det bättre (stående format)
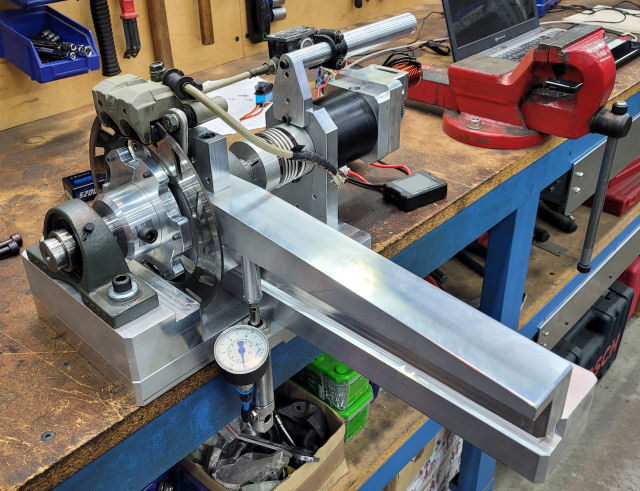
Jag har länge velat prova hur bra värde det går att få ut av en vanlig vätskefylld pneumatikcylinder med tryckgivare som lastcell. En enkel bromsbänk med mekanisk broms borde ju gå att sno ihop hyggligt snabbt...?
Nja, redan i CAD-stadiet borde jag ha insett att så snabbt lär det inte gå, men nyfikenheten tog som vanligt överhanden och efter en hel del mätande och ritande fanns en hygglig modell i datorn. Fiddy:n fick vara donator till bromsen och Gabriellas gamla bakskiva hamnade nu här istället för på återvinningen.
Letade i diverse gömmor för att skaka fram lagerbockar, lager, bälgkoppling och cylinder





Den visade jämna utslag vid test med handen som tryckte ner momentarmen längst ut. Inte jätte hysteres heller verkar det som, för den går fint ner till 0 igen.
Provar att bara avläsa mätaren manuellt innan jag köper en tryckgivare och kopplar in det i mätsystemet.
Ville gärna ha återkoppling på varvtalet så det blev att knåpa ihop ett triggerhjul och en vanlig induktiv givare från jobbet. Problemet med dem är att de går på 24V och Arduinon gillar inte mer än 5V...
En del googlande och funderande senare så löstes det med bl.a en transistor. Till och med Arduinon trivdes...!
Problemet med oscilloscop är att de kan så förskräckligt mycket så de är rätt komplexa att använda, speciellt för gamla mekaniker.
Nåja, friskt kopplat, hälften brunnit. Finns bara ett sätt att få reda på om saker funkar och det är att försöka
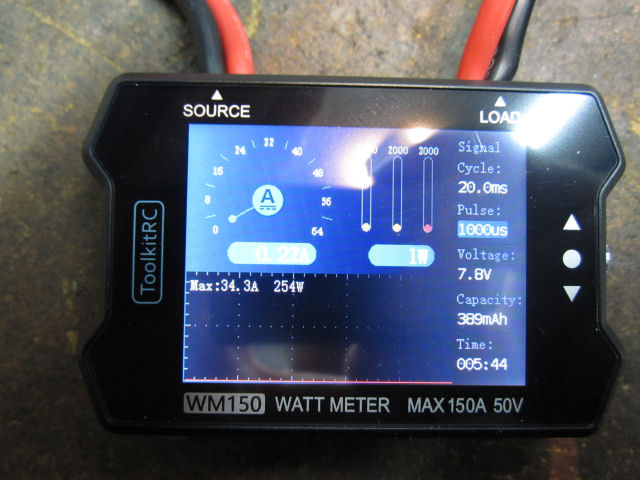
7.1[V] x 3300 [kV] / 4.5 [i1] / 10 [i2] = 520 [rpm] blev inte mer än 310rpm i verkligheten.
Ett par reflektioner efter körning:
1. Jag har inga programmeringsverktyg till ESC:n så jag vet inte alls hur den var ställd, svårt att veta om det går att ställa upp ytterligare
2. Systemet slog av runt 60A och högsta output jag såg på mätaren var ca 400W, dvs långt under de 800W som annonserats
3. Svårt att få ut några värde med bromsen då effekten låg nära max innan jag ens började bromsa
Det kändes som enda sättet att komma vidare var att tro på konceptet och handla Castle-grejorna. Lite brydd över det låga varvtalet för jag behöver i princip de teoretiska värdena för att känna mig säker på startsekvensen. Ähh, ingen kommer ihåg en fegis...!
Efter registrering på Castles hemsida skickades även en gratis USB-dongel för programmering av ESC:n. Lika mycket parametrar som en gammal 90-tals motorstyrning. Loggning av prestanda och hela kitet. Det finns uppenbarligen de som tar RC på största allvar. Bra för mig för då kanske jag kan parametrera den så skevt att den funkar till denna way off applikation!


Har också lite tankar framöver som vi får se vart de tar vägen. Lika bra att vara beredd

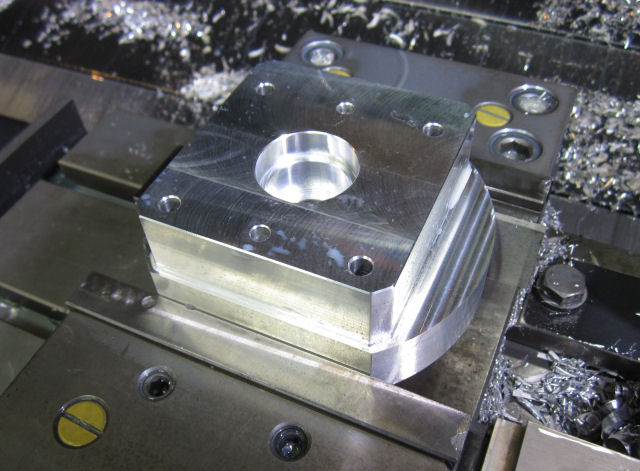
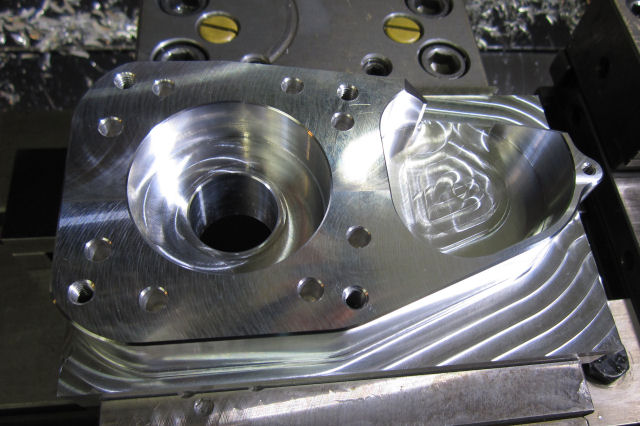
Första rundan i skruvstycket
Har för dålig utrustning för att löda så här grova kablar och kontakter. Får värma alldeles för länge så frågan är hur bra lödningarna är...?
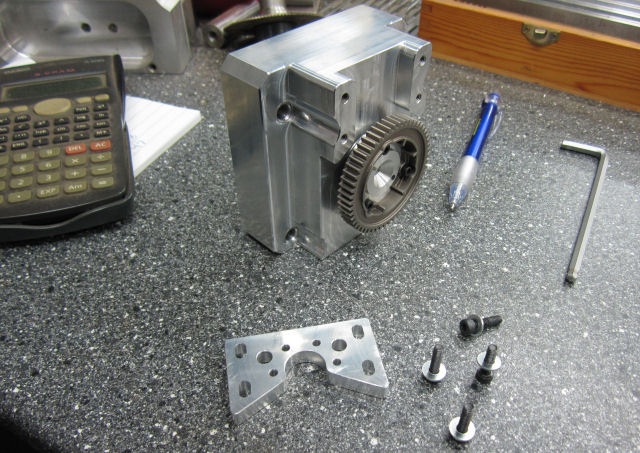
Pratade med Martin Nyman här om dagen och av en slump kom vi in på kugghjulen innan planeten. Helt otroligt så visar det sig att han tillverkar kugghjul med rätt modul, tandantal och kuggbredd för mitt ändamål..!! Nitrerad 2244 till på köpet. Ser till och med ut som om det skulle gå att modifiera navet för att passa min applikation. Är lite rädd för hur det är att ta sig igenom ytskiktet med svarvstål och även borr / gängtapp på baksidan.. Vi får väl se när vi kommer så långt...
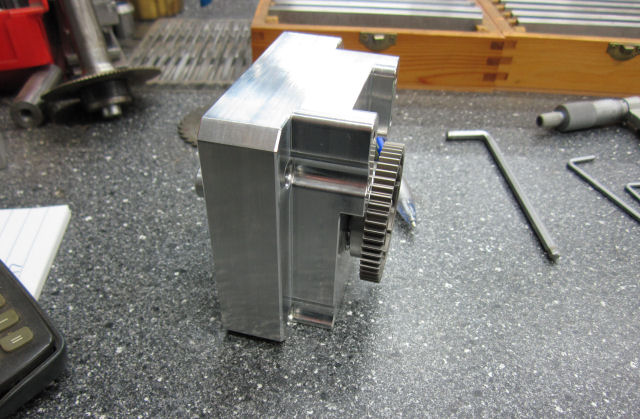
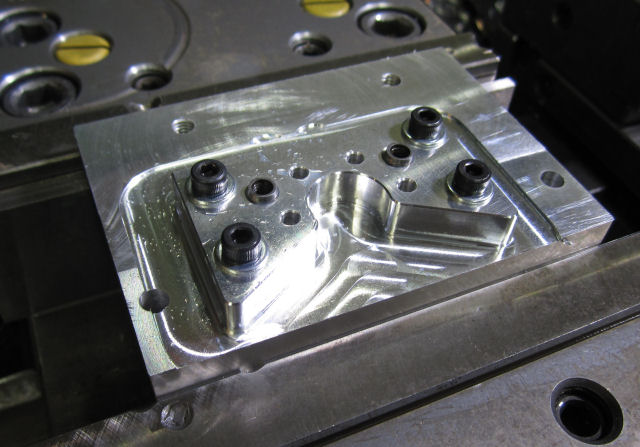
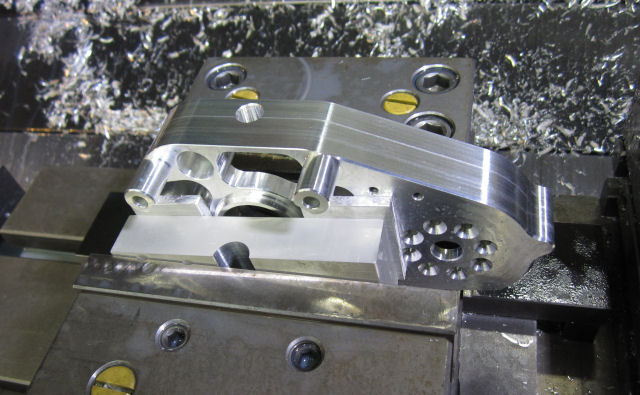
Första passet på fixtur




Har bytt ut linjärpotentionetern mot en joystick med två potentiometrar. Nu kan jag köra motorn för sig och sevot för sig. Förde givetvis med sig en del jobb med firmwaren.
ESC:n skall kalibreras innan man kan köra. Simpelt starta med fullt fram, sedan fullt bak och därefter neutral. Testet gick utan missöden men det finns massor att justera i ESC:n innan det blir optimalt. Allt är i princip orört


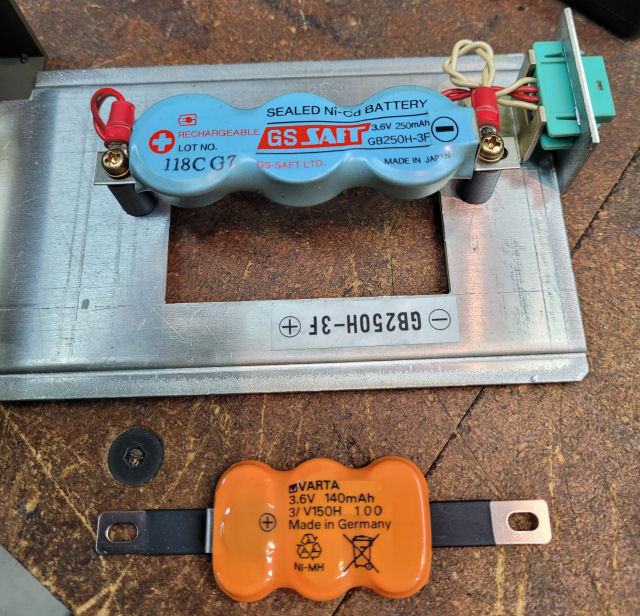
Lyckades efter passa pill, en liten flock svordommar och till slut våld(!) få loss luckan till batteriet. Det visade sig att det var inte bara luckan utan ett helt instickskort MED batteriet! Tur att jag hade maskinen igång annars hade det varit kört...
Mindre roligt var det ju att jag upptäckte att det var helt fel batteri jag fått. Varken formen, batterityp eller kapacitet var rätt... Jaha, bara att sätta i det igen och fundera vidare. För att försöka få till en förbättring lät jag maskinen stå på i flera dygn, något jag aldrig gjort innan. Och tro det eller ej så tog batteriet laddning och jag har inte fått batterilarm på länge. Borde nog försöka skaffa ett nytt batteri oavsett, men det prioriteras lätt ner när det fungerar...
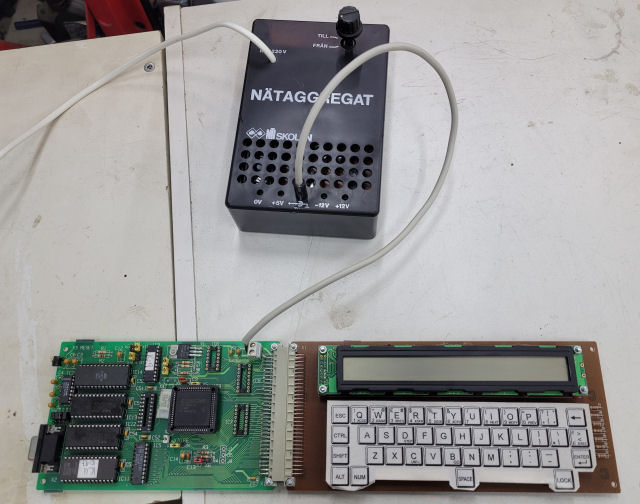
Har alltid varit intresserad av elektronik / datorer så 1997-02-22 skev jag in mig på NTI-skolans distansutbildning i Digital Elektronik och Microkontrollers. Gick ju samtidigt sista året på höskolan så det blev väl inte jättemycket tid över till detta, men den senare delen av utbildningen bestod av att löda ihop kretkortet till en labbvariant av en microkontroller. Det var intressant nog att få tid till så den lyckades jag få att fungera. Sen började jag jobba på IndustriTeknik så orken tog slut innan jag hann genoma resten av kursen.
Hittade labbkittet i en låda tillsammans med spänningsaggregatet som var en annan praktisk övning i kursen. Provade att slå på strömmen och ta mig tusan så hoppade det igång! Nostalgi på hög nivå!
Det roliga i det hela är ju att ens jämföra t.ex en ESP32 med denna dinosaurie är skrattretande. Prestandan går inte att gämföra på något plan, ESP32:an har både WiFi, blåtand, seriell, I2C, SPI, osv kommunikationsplattformar medan denna endast har en rätt begränsad seriell kommunikation. Det fysiska formatet har ju också krympt en del...